Attention
This documentation is a work in progress. Expect to see errors and unfinished things.
xy_pi_clip
Description
Proportional-Integral gain for multiplexed X-Y data stream,
with programmable clip levels. Timing plan shown below.
Spartan-6: 159 LUTs, 1 DSP48A1
(not counting ~36 LUTs needed to generate coeff and lim)
XXX this is the critical timing path, streamline and/or pipeline some more
XXX proportional and integral gain terms need very different scaling?
Serious pipelining internally.
At any one point, the data flow sequence is:
X integral high-side clip (new data from multiplier summed with previous X integral term)
Y integral high-side clip (new data from multiplier summed with previous Y integral term)
X proportional high-side clip (new data from multiplier summed with previous X integral term)
Y proportional high-side clip (new data from multiplier summed with previous Y integral term)
X integral low-side clip (recirculated data from high-side clip)
Y integral low-side clip (recirculated data from high-side clip)
X proportional low-side clip (recirculated data from high-side clip)
Y proportional low-side clip (recirculated data from high-side clip)
in_xy coeff lim
sync xerr
. yerr x_int
. . y_int
. . x_prop
. . y_prop
. . . x_hi
. . . y_hi
. . . x_hi
sync . . y_hi
. . . x_lo
. . . y_lo
. . . x_lo
. . . y_lo
. . . . o_sync out_x
. . . . . out_y
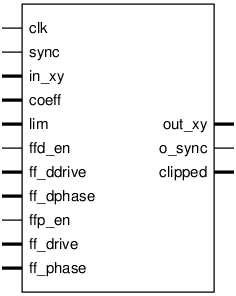
Pinout
Parameters
Name |
Min |
Max |
Default |
Description |
|---|---|---|---|---|
ff_dshift |
? |
? |
0 |
Deferred ff_ddrive downshift |
Ports
Signal |
Direction |
Description |
|---|---|---|
clk |
Input |
timespec 6.8 ns |
sync |
Input |
high for the first of the xy pair |
in_xy[17:0] |
Input |
|
out_xy[17:0] |
Output |
|
o_sync |
Output |
|
coeff[17:0] |
Input |
|
lim[17:0] |
Input |
|
ffd_en |
Input |
|
ff_ddrive[17:0] |
Input |
FF drive (derivative) to be accumulated in I term |
ff_dphase[17:0] |
Input |
FF phase (derivative); currently unused |
ffp_en |
Input |
|
ff_drive[17:0] |
Input |
FF drive added to P term |
ff_phase[17:0] |
Input |
FF phase |
clipped[3:0] |
Output |
Implementation and use
The portable Verilog implementation can be found in xy_pi_clip Source File
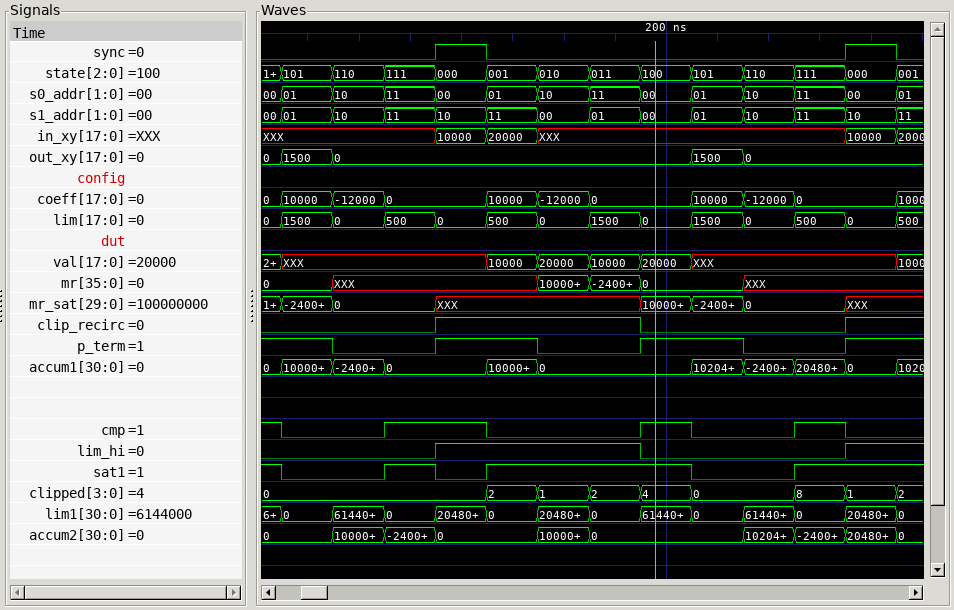
Timing Diagram
A GTKWave-generated timing diagram is shown below: